

Maneki Neko – wer kennt sie nicht? Die kleinen, süßen Kunststoffkatzen aus dem Asia-Markt oder Sushi Restaurant. In diesem Beitrag möchte ich zeigen, wie man, mit Hilfe eines Arduino oder ESP8266, aus einer normalen Winkekatze eine IoT Winkekatze macht.
Winkekatze? Maneki-neko? Was ist das?
Bedeutung
Winkekatzen werden unter anderem auch als Glückskatze, Maneki Neko, Beckoning Cat, Winkende Katze oder Lucky Cat bezeichnet. Sie gelten als japanischer Glücksbringer und sollen dem Betrachter Glück bringen und ihn mit ihrer Pfote herbeiwinken. Heute sind sie vor allem in Japan, Taiwan, Thailand und China beliebt und werden dort häufig in Einkaufspassagen, Restaurants und Lotterien verwendet.
Auch in vielen privaten japanischen Haushalten ist die Winkekatze noch heute zu sehen. Sie soll Wohlstand bringen und Unglück und böse Geister fern halten. Ihr heutiges Erscheinungsbild geht auf die Katzenrasse Japanese Bobtail zurück.
Ursprung
Der Ursprung der (nicht-) Iot Winkekatze geht bis in das 17. Jahrhundert zurück. Bereits seit Beginn der Edo-Zeit (1603–1867) sind Legenden und Anekdoten rund um glückbringende Katzen überliefert.
Im chinesischen Raum glaubte man, dass es zu regnen anfinge, wenn eine Katze sich das Gesicht wäscht und da die Putzbewegungen mit den Pfoten teilweise wie Winken wirkt, glaubte man, die Katze rufe die Leute (und auch Kundschaft) ins Haus. In Japan hingegen wurde das Winken zuweilen als eine wohlmeinende Warnung vor einem nahenden Unglück gedeutet.
Farben
Maneki Nekos sind stets ähnlich gestaltet, wobei es kaum Grenzen in Größe und Material gibt. Im Gegensatz dazu gibt es eine Vielzahl verschiedener Farbkombinationen, welche diverse Eigenschaften besitzen sollen:
| dreifarbig | bringt Glück und Wohlstand |
| weiß | Reinheit und Unschuld |
| schwarz | wehrt Dämonen ab |
| gold | soll Reichtum anziehen |
| rot | vertreibt Krankheiten |
| pink | soll Liebhaber anlocken |
IoT Winkekatze bauen
Werkzeug
Material
- Winkekatze
- Arduino oder ESP8266 Board (z.B. Wemos D1 Mini )
- Breadboard und Jumper-Kabel
Info: Ich denke, dass alle batteriebetriebenen Winkekatzen ein ähnliches Innenleben haben, jedoch kann man nie zu 100% sicher sein. Die oben verlinkte Figur funktioniert nach dem, in diesem Beitrag beschriebenen, Prinzip.
Umbau der IoT Winkekatze
Der Umbau der Winkekatze gestaltete sich viel einfacher als erwartet. Als ersten Schritt musste ich lediglich eine Schraube auf der Unterseite der Figur lösen um anschließend die Technik vom Gehäuse trennen zu können.
Um den Winke-Mechanismus jedoch komplett aus dem Gehäuse zu entfernen musste noch der Winke-Arm demontiert werden. Da dieser jedoch nur aufgesteckt ist, konnte der Arm durch leichtes drehen entfernt werden.

Unterseite mit Schraube 
Arm Verankerung 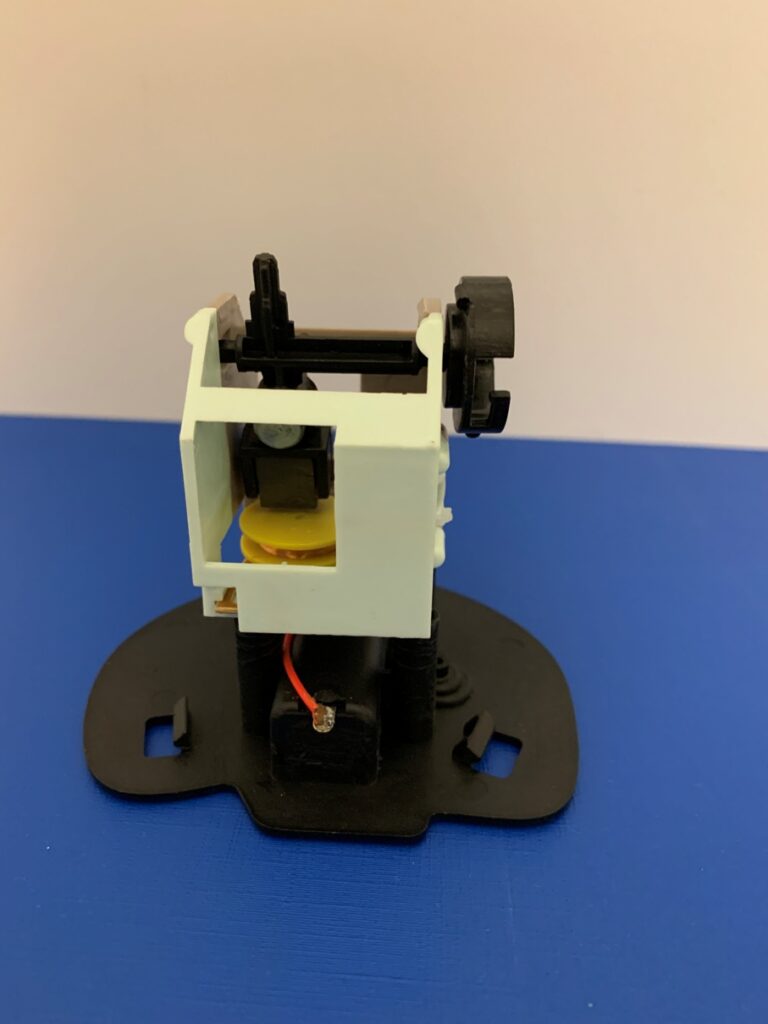
Innenleben und Elektrogerät


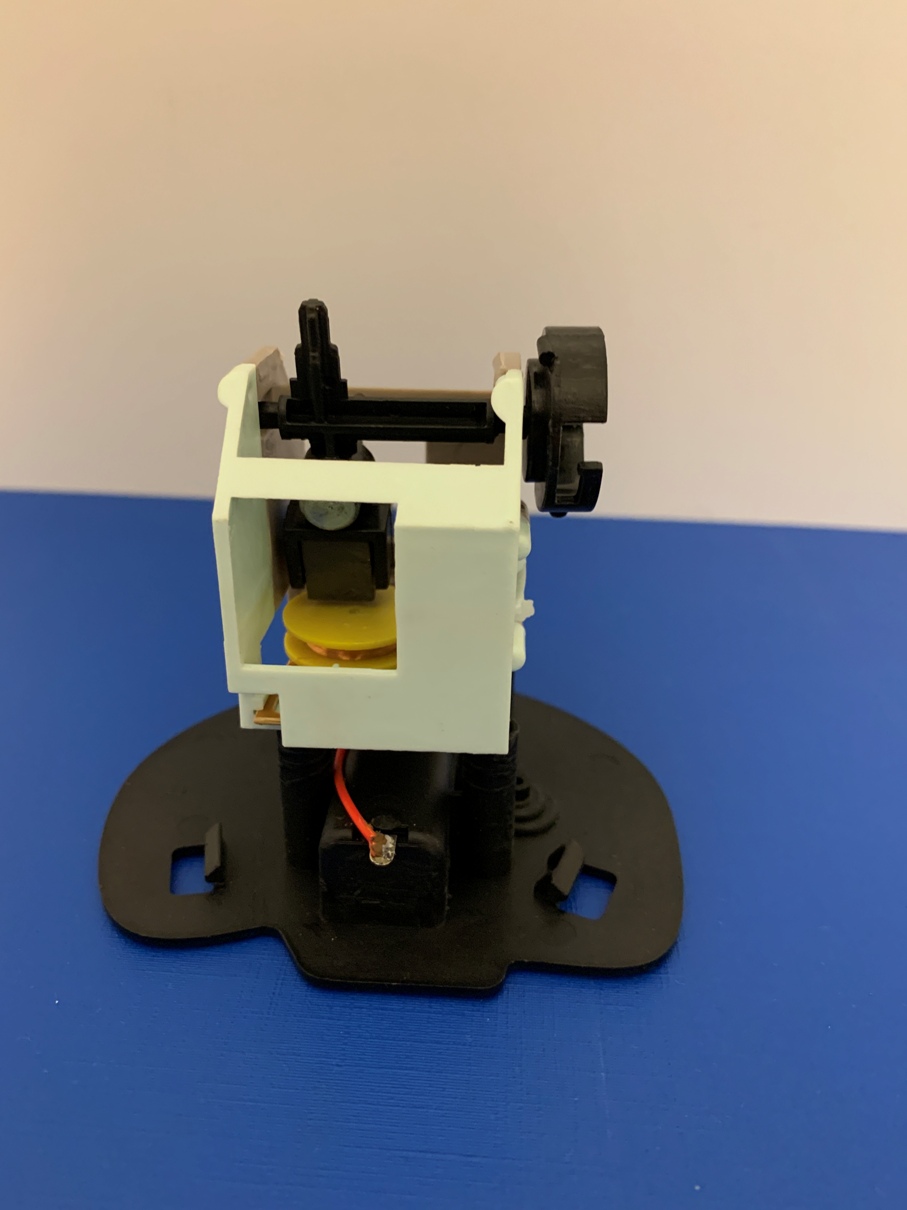
Im nächsten Schritt werden nun die Verbindungskabel am Elektromagneten angelötet. Hierzu habe ich schlicht zwei Jumperkabel an einem Ende abisoliert und an die vorhanden Lötstellen des Batteriehalters angebracht. Die Kabelenden wurden durch ein Loch im Batteriefach nach Außen verlegt und können dadurch problemlos auf ein Breadboard gesteckt werden.

(schlechte) Lötstelle 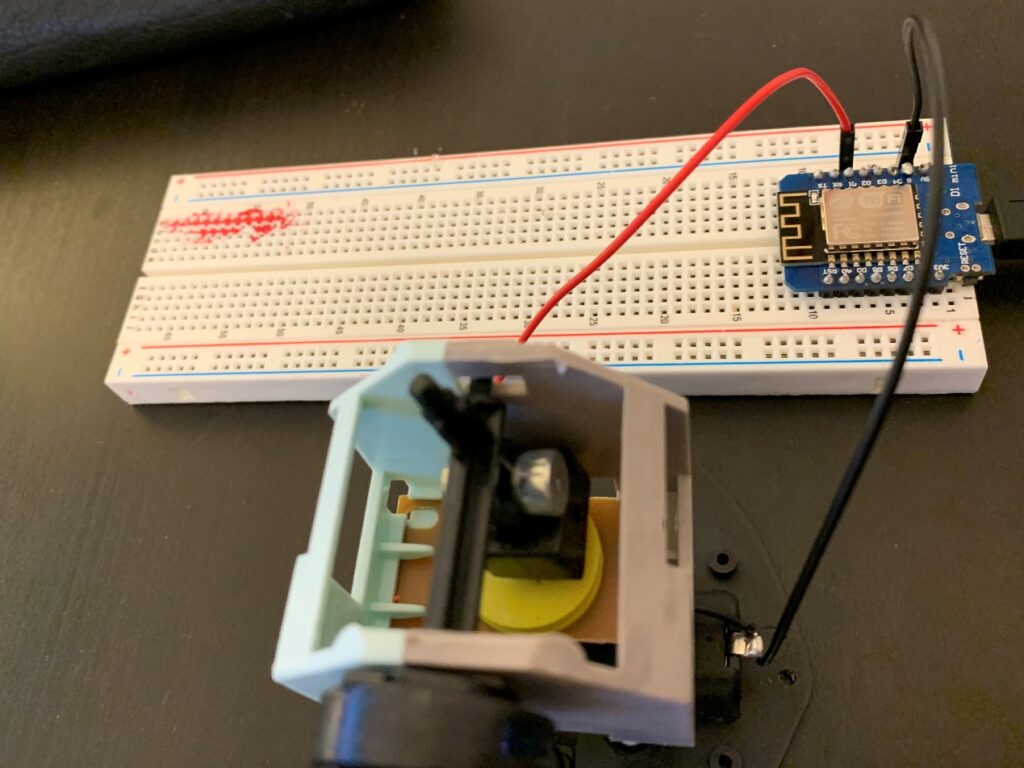
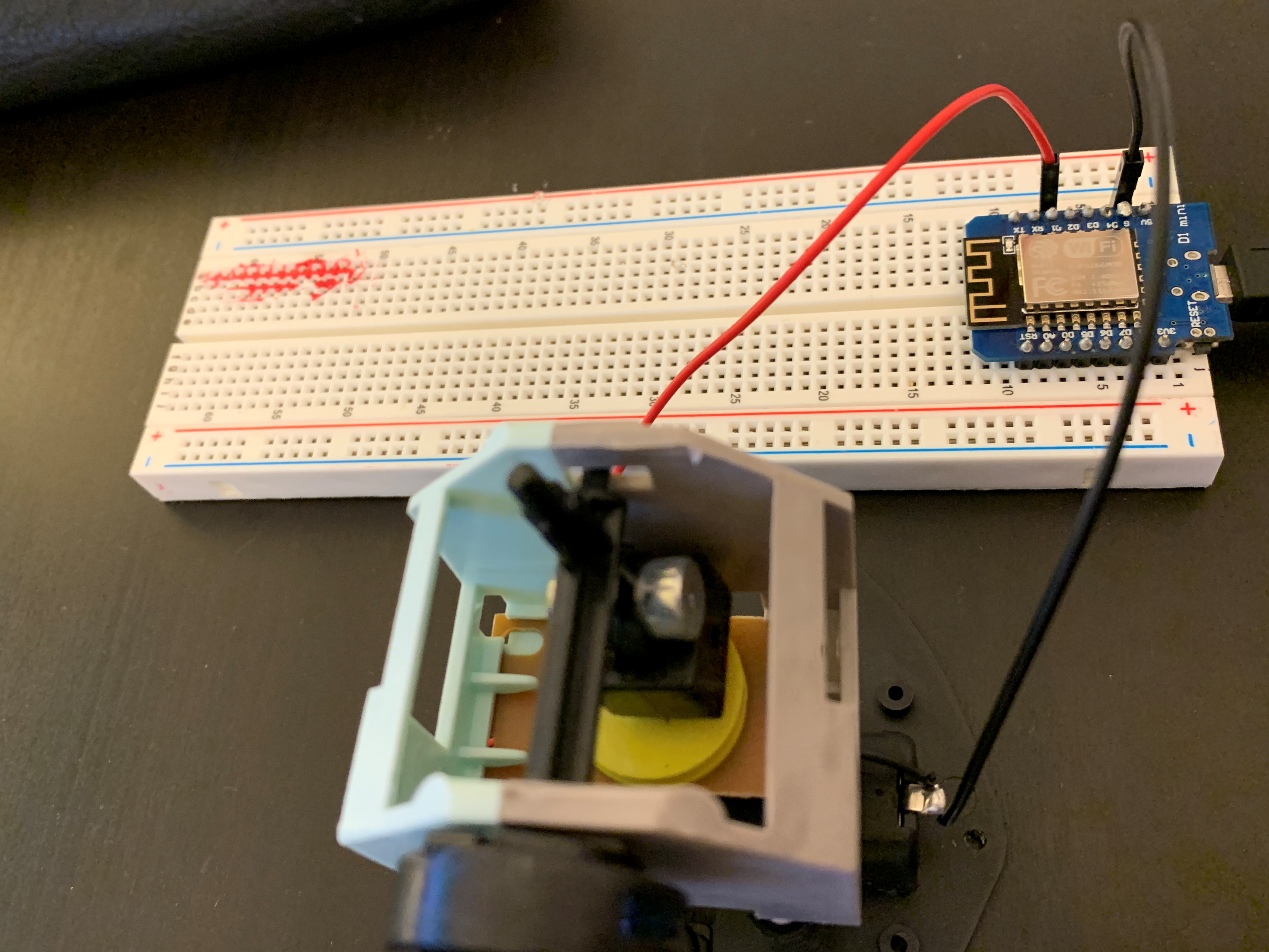
Breadboard Aufbau 
Rückseite mit Kabelenden


Mit etwas Geschick kann selbstverständlich der gesamte Mikrocontroller im Katzengehäuse untergebracht werden. Für meine Zwecke ist die externe Verbindung jedoch vollkommen ausreichend.
Verkabelung der IoT Winkekatze

Der Schaltplan, wenn man ihn so nennen darf, ist recht trivial.
Es muss lediglich GND mit dem negativen Pol und D1 mit dem positiven Pol verbunden werden.
| IoT Winkekatze | Wemos D1 Mini |
|---|---|
| positiver Pol ( + ) | D1 |
| negativer Pol ( – ) | GND |
Test und Arduino Sketch
Um die Verkabelung und Funktionalität zu überprüfen habe ich den folgenden simplen Sketch erstellt. Dieser lässt die Winkekatze für zehn Sekunde winken und pausiert anschließend weitere zehn Sekunden.
// IoT Winkekatze - Maneki Neko - Lucky cat
// iotspace.dev
//
void setup() {
pinMode(D1, OUTPUT);
Serial.begin(115200); //Starts the serial connection
}
void loop() {
Serial.println("Cat OFF - waiting 10 seconds");
digitalWrite(D1, LOW); //turns waving off
delay(5000); //wait 5 seconds
Serial.println("5 seconds ...");
delay(5000); //wait 5 seconds
Serial.println("Cat ON for 10 seconds");
digitalWrite(D1, HIGH); // turn waving on by making the voltage HIGH
delay(10000); // wait for ten seconds
}Anschließend sollte das Ganze in etwa so aussehen:
Und jetzt?
Dieser Beitrag sollte nur der erste Schritt für viele folgende IoT Winkekatzen-Projekte sein. In den kommenden Wochen und Monaten werden mehrere Projekte und Ideen rund um das Thema Winkekatzen auf diesem Blog veröffentlicht. Stay tuned 🙂
Mehr zum Thema Arduino und Co

Möchtest du mehr interessante Arduino Projekte kennen lernen und weiter in die Welt der Mikrocontroller einsteigen? Dann empfehle ich das Buch Arduino Kompendium: Elektronik, Programmierung und Projekte – damit ist es möglich auch ohne umfassende Elektronik- und Programmiervorkenntnisse eigene intelligente Arduino-Projekte umzusetzen.